Content
As quadruped robots, especially those designed to mimic wolves, continue to gain traction in robotics and artificial intelligence, the importance of choosing the right bearings cannot be overstated. Bearings play a crucial role in the performance and durability of these robots, which require high precision, efficient movement, and reliability.
When it comes to choosing bearings for any robotic application, especially for quadruped robots, the material of the bearing is a crucial factor. For quadruped robot wolves, which are designed to perform complex movements and operate in varying environments, the quadruped robot wolf bearing material must ensure long-term durability under high stress and friction. The most commonly used materials in bearing construction include:
Choosing the right material depends on the environmental conditions the robot will operate in, as well as its performance demands. UKL Bearing Manufacturing Co., Ltd. provides a range of ceramic bearings specifically designed to withstand extreme conditions, making them ideal for high-performance applications in robotic systems.
Quadruped robot wolves are engineered to replicate the movement of real wolves, requiring precise coordination of limbs. The load capacity of the bearings is essential for ensuring smooth movement and efficient energy transfer. The bearings must handle the robot’s weight and the forces exerted during movement.
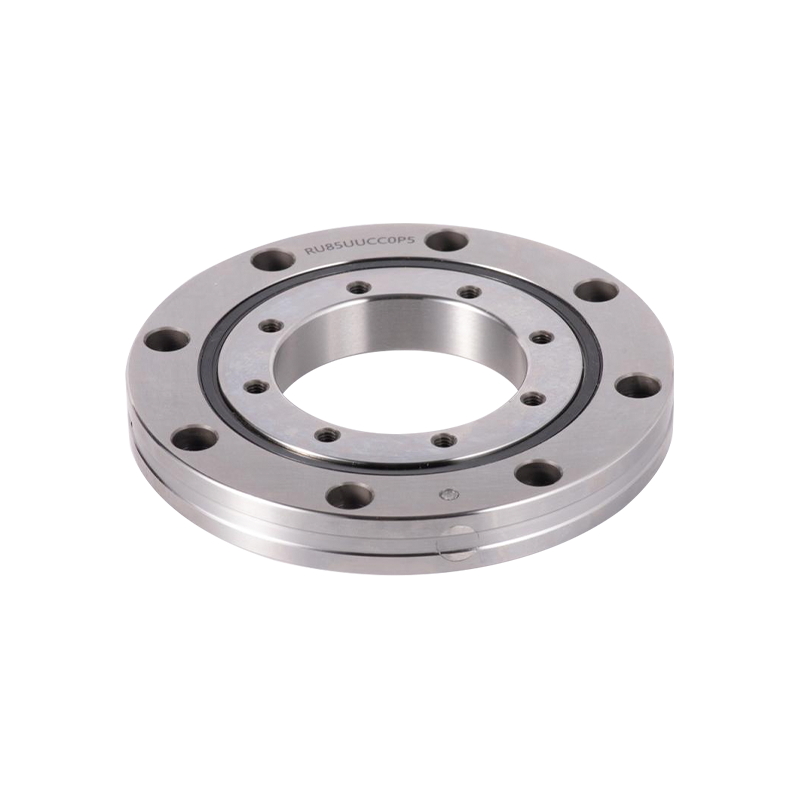
Bearings with higher load capacities ensure that the robot’s limbs can support weight, especially when running or performing high-impact tasks. The bearings used in the robot’s joints must be designed to carry both radial and axial loads, as these joints endure different stress types during movement.
Speed and precision are integral to the movement of quadruped robots. Bearings that allow for smooth rotation and minimal friction are crucial for ensuring fast and accurate movements, especially for robot wolves that perform tasks like running, climbing, or making swift directional changes.
Bearings require proper lubrication to minimize wear and friction. For quadruped robot wolves, regular maintenance is required to ensure that the bearings remain in top condition and continue to function effectively. There are two types of lubrication systems commonly used:
The choice between grease and oil lubrication will depend on the robot’s specific application, as well as the environment in which it operates. UKL Bearing Manufacturing Co., Ltd. offers both lubrication options, ensuring that the bearings can be tailored to meet specific operational needs.
Environmental conditions such as temperature, humidity, and exposure to dust or water can significantly impact the performance and lifespan of bearings in robotic systems. For quadruped robot wolves that may operate in outdoor environments or areas with fluctuating temperatures, selecting bearings that can withstand these conditions is essential.
Bearings made from corrosion-resistant materials, such as stainless steel or ceramic, are ideal for environments exposed to moisture or other corrosive elements. Additionally, bearings with protective seals or shields can help prevent dirt, dust, or debris from contaminating the bearing and impairing its function.
Below is a video of UKL’s technicians performing raceway precision testing on bearings. Specifically, the technicians use a dual dial indicator (micrometer) to measure the radial runout, face runout, roundness, and coaxiality of the bearing’s raceways. This testing process is crucial for verifying the dimensional tolerances and geometric accuracy of the bearing. Additionally, it is commonly used to check the bearing’s clearance and assembly precision. The aforementioned tests are a key step in the final quality inspection process before the bearing leaves the factory, ensuring that each bearing meets the established performance standards.
Selecting the appropriate bearings for quadruped robot wolves requires careful consideration of several factors. From material and load capacity to speed, precision, lubrication, and environmental conditions, each element plays a vital role in ensuring that the robot operates smoothly and efficiently.
1. What is the best bearing material for quadruped robot wolves?
The best material depends on the robot’s operating conditions, but ceramic bearings are often preferred for their lightweight and corrosion-resistant properties, ideal for high-performance applications.
2. How do I choose bearings based on load capacity for my robot wolf?
Bearings with high load capacities are necessary to support the weight of the robot and handle the forces exerted during movement, particularly during high-impact tasks.
3. What type of lubrication is best for bearings in robot wolves?
Oil lubrication is typically preferred for high-speed and heavy-load applications, while grease lubrication is suitable for robots with moderate operating conditions.
4. Can bearings withstand harsh environments like outdoor or wet conditions?
Yes, bearings made from corrosion-resistant materials like stainless steel or ceramic, along with proper seals, can withstand challenging environmental conditions.
5. How do I ensure long-term performance and maintenance of bearings in robotic systems?
Regular maintenance, including lubrication and inspection for wear and tear, is essential for maintaining the performance and longevity of bearings in robotic systems.
Product Categories
Contact Us

Jane@ukl-bearing.com
Jenny@ukl-bearing.com
Andy@ukl-bearing.com
Ivy@ukl-bearing.com

+86-510- 88763239
+86-15371057968

No.1 Hehuan Road, Hudai Town, Binhu District, Wuxi City.
Ready to Begin?
Get in Touch

Now!
UKL BEARING
 English
English Español
Español русский
русский